参数服务器
参数服务器(Parameter Server) 是 ROS 提供的一个共享数据存储机制,用于存储参数,实现不同节点之间的数据共享。例如:
- 机器人的配置(如轮子半径、最大速度)
- 节点的运行参数(如控制频率、阈值)
它是全局的,每个节点都可以 读取、设置、删除 参数,就像访问一个“全局字典”。
理论模型
参数服务器实现是最为简单的,该模型如下图所示,该模型中涉及到三个角色:
- ROS Master (管理者)
- Talker (参数设置者)
- Listener (参数调用者)
ROS Master 作为一个公共容器保存参数,Talker 可以向容器中设置参数,Listener 可以获取参数。
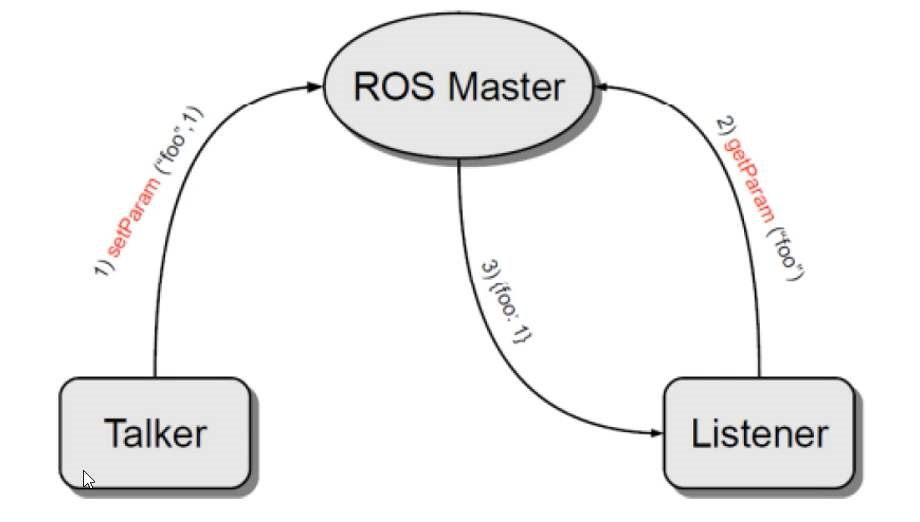
整个流程由以下步骤实现:
1.Talker 设置参数
Talker 通过 RPC 向参数服务器发送参数(包括参数名与参数值),ROS Master 将参数保存到参数列表中。
2.Listener 获取参数
Listener 通过 RPC 向参数服务器发送参数查找请求,请求中包含要查找的参数名。
3.ROS Master 向 Listener 发送参数值
ROS Master 根据步骤2请求提供的参数名查找参数值,并将查询结果通过 RPC 发送给 Listener。
参数可使用数据类型:
- 32-bit integers
- booleans
- strings
- doubles
- iso8601 dates
- lists
- base64-encoded binary data
- 字典
注意:参数服务器不是为高性能而设计的,因此最好用于存储静态的非二进制的简单数据
常用操作
获取参数
函数:rospy.get_param(name, default=None)
作用:获取指定名称的参数值,如果该参数不存在,返回默认值。每次调用都会实时访问参数服务器,获取最新值。
| speed = rospy.get_param("robot_speed", 1.0)
|
终端命令:
函数:rospy.get_param_names()
作用:返回当前参数服务器上所有参数的完整列表(带路径)。
| all_params = rospy.get_param_names()
print(all_params)
|
终端命令:
函数:rospy.get_param_cached(name)
作用:获取指定参数的值(缓存版本),第一次调用时访问参数服务器,之后的调用直接从本地缓存读取,不会再次访问 Master,因此更快。
| speed = rospy.get_param_cached("robot_speed")
|
终端命令:
设置/修改参数
函数:rospy.set_param(name, value)
作用:设置或修改一个参数(会自动创建或更新)。
| rospy.set_param("robot_name", "P0w3rBot")
|
终端命令:
| rosparam set <param_name> <value>
|
删除参数
函数:rospy.delete_param(name)
作用:删除参数,如果不存在则抛出异常。
| rospy.delete_param("robot_name")
|
终端命令:
| rosparam delete param_name
|
检查参数
函数:rospy.has_param(name)
作用:判断指定参数是否存在。
| if rospy.has_param("robot_speed"):
print("参数存在")
|
终端命令:
| rosparam get param_name # 若不存在会报错
|
搜索参数
函数:rospy.search_param(key)
作用:在参数命名空间中向上查找指定参数名称,返回完整路径。
| param_path = rospy.search_param("robot_speed")
# 可能返回:'/namespace1/robot_speed'
|
终端命令:
| rosparam list | grep <relative_name>
|
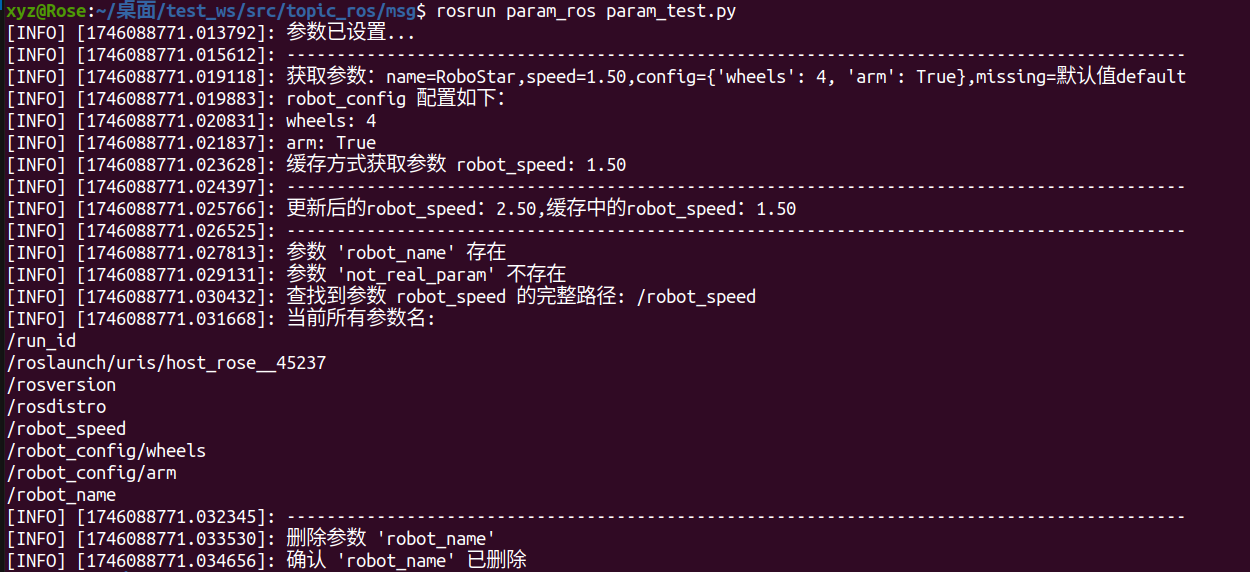
演示
param_test.py:
| #!/usr/bin/env python
import rospy
# 设置参数到ROS参数服务器
def create_param():
rospy.set_param("robot_name", "RoboStar") # 设置字符串参数
rospy.set_param("robot_speed", 1.5) # 设置浮点型参数
rospy.set_param("robot_config", {"wheels": 4, "arm": True}) # 设置字典型参数
rospy.loginfo("参数已设置...") # 控制台打印提示信息
# 获取参数并打印
def read_param():
name = rospy.get_param("robot_name") # 获取字符串参数
speed = rospy.get_param("robot_speed") # 获取浮点型参数
config = rospy.get_param("robot_config") # 获取字典参数
missing = rospy.get_param("not_exist_param", "默认值default") # 获取不存在的参数,设置默认值
rospy.loginfo("获取参数:name=%s, speed=%.2f, config=%s, missing=%s",
name, speed, config, missing)
# 遍历 robot_config 字典参数
rospy.loginfo("robot_config 配置如下:")
for key, value in config.items():
rospy.loginfo("%s: %s", key, value)
# 使用缓存机制获取参数(第一次访问时缓存)
speed_cached = rospy.get_param_cached("robot_speed")
rospy.loginfo("缓存方式获取参数 robot_speed: %.2f", speed_cached)
# 更新参数,并展示缓存机制行为
def update_param():
old_speed = rospy.get_param_cached("robot_speed") # 注意:此时缓存的是旧值1.5
rospy.set_param("robot_speed", 2.5) # 更新参数为新值2.5
new_speed = rospy.get_param("robot_speed") # 直接获取最新值
rospy.loginfo("更新后的robot_speed:%.2f, 缓存中的robot_speed:%.2f", new_speed, old_speed)
# 检查参数是否存在、查找完整参数名、列出所有参数
def find_param():
if rospy.has_param("robot_name"): # 检查参数是否存在
rospy.loginfo("参数 'robot_name' 存在")
if not rospy.has_param("not_real_param"): # 检查一个不存在的参数
rospy.loginfo("参数 'not_real_param' 不存在")
full_key = rospy.search_param("robot_speed") # 查找 robot_speed 的完整命名空间路径
rospy.loginfo("查找到参数 robot_speed 的完整路径: %s", full_key)
all_params = rospy.get_param_names() # 获取所有参数名称
rospy.loginfo("当前所有参数名: \n%s", "\n".join(all_params))
# 删除参数并验证删除结果
def del_param():
rospy.delete_param("robot_name") # 删除参数
rospy.loginfo("删除参数 'robot_name'")
if not rospy.has_param("robot_name"): # 验证参数已被删除
rospy.loginfo("确认 'robot_name' 已删除")
# 主函数入口
if __name__ == "__main__":
rospy.init_node("param_node") # 初始化 ROS 节点,节点名为 param_node
create_param() # 设置参数
rospy.loginfo("-"*90)
read_param() # 读取参数
rospy.loginfo("-"*90)
update_param() # 修改参数
rospy.loginfo("-"*90)
find_param() # 参数查询
rospy.loginfo("-"*90)
del_param() # 删除参数
|